
Research Overview
[Click here for information on our research funding and grants]
Our research uses mechanics to create robots and smart structures with unprecedented capabilities. In parallel, it employs robotics to uncover the fascinating mechanics behind advanced materials and biological locomotion. Our core research is an amalgamation of mechanics, robotics, computer graphics, and machine learning.
Mechanics for Robotics: Robotics presents a formidable challenge to the field of mechanics. First, real-time control of robots requires that the robotic motion is simulated in a computer faster than real-time. Second, the simulations have to be physically accurate. My research tackles this challenge by formulating computationally efficient modeling tools that leverage cutting-edge algorithms from computer graphics. These tools are augmented using machine learning (ML) to (1) reduce the order of the models for further computational gain and (2) account for manufacturing defects and disturbances that are invariably present in the real world. This “digital twin” approach has already led to several robots that use instability and large deformation in structures for functionality; this is in contrast with the conventional view that instability and deformation in engineering lead to failure.
Robotics for Mechanics: Metamaterials and complex materials have become integral parts of engineering with a broad range of applications: morphable structures, stretchable electronics, wearable devices, and additive manufacturing. The unusual mechanics of these materials is often not amenable to traditional experimental and numerical analysis. Design and fabrication of structures using these materials as building blocks, therefore, remains a challenge. My research aims to address this gap by (1) autonomous robotic experiments to collect enormous amounts of data and (2) employing ML on the collected data to find trends and patterns (e.g., NN-based constitutive description of materials).
Applications: For translation to practice, we are actively working in precision agriculture and energy-efficient manufacturing.
Research Projects

Drone-based Biological Pest Control in High Tunnels
Leveraging advancements in computer vision, AI, and robotics, this project introduces an autonomous drone system for biocontrol in high tunnel berry production. While high tunnels enhance yields and fruit quality, they pose unique challenges for pest management, limiting conventional drone-based predatory mite release used in open fields. By integrating real-time obstacle avoidance and precision dispersal technology, this system enables targeted, efficient pest control without pesticides. Its autonomous capabilities ensure adaptability across varying tunnel structures, reducing labor costs and environmental impact.

Peristaltic Actuator
Inspired by biological peristalsis, this project introduces a scalable, modular soft robotic actuator system designed for efficient and delicate object transport. Utilizing donut-shaped compression and longitudinal inflation modules, the system is ideal for handling fragile and irregularly shaped objects. Its modular design allows for cost-effective scalability, adaptability, and ease of repair. Real-time pressure feedback control ensures precise object manipulation, enabling applications in soft robotics, automation, and underwater exploration. Future efforts will also explore the system's potential for climbing applications.

Measure Anything
Measure Anything is an open-source framework designed to provide real-time dimensional measurements of objects with circular cross-sections from stereo camera input. Built upon the powerful Segment Anything Model (SAM), the framework estimates key geometric features such as diameter, length, and volume for rod-like structures with varying curvature, as well as general objects with constant skeleton slopes.

DiSMech
DiSMech (Discrete Simulation for Mechanics of Slender Structures) is an open-source simulation software being developed at the Structures-Computer Interaction Lab at UCLA in collaboration with Boston University and Carnegie Melon University, to simulate complex soft structures that can be modeled as flexible rods, plates, or shells, or a combination thereof. Based on discrete-differential geometry, It uses the popular discrete elastic rods theory to simulate rods and two different discrete elastic shell models to simulate thin plates and shells.
Simulation of Rolling Robot
With the ultimate goal of a computational framework for soft robotic engineering, we introduced a numerical simulation tool for limbed soft robots that draws inspiration from discrete differential geometry-based simulation of slender structures. The simulation incorporates an implicit treatment of the elasticity of the limbs, inelastic collision between a soft body and a rigid surface, and unilateral contact and Coulombic friction with an uneven surface.

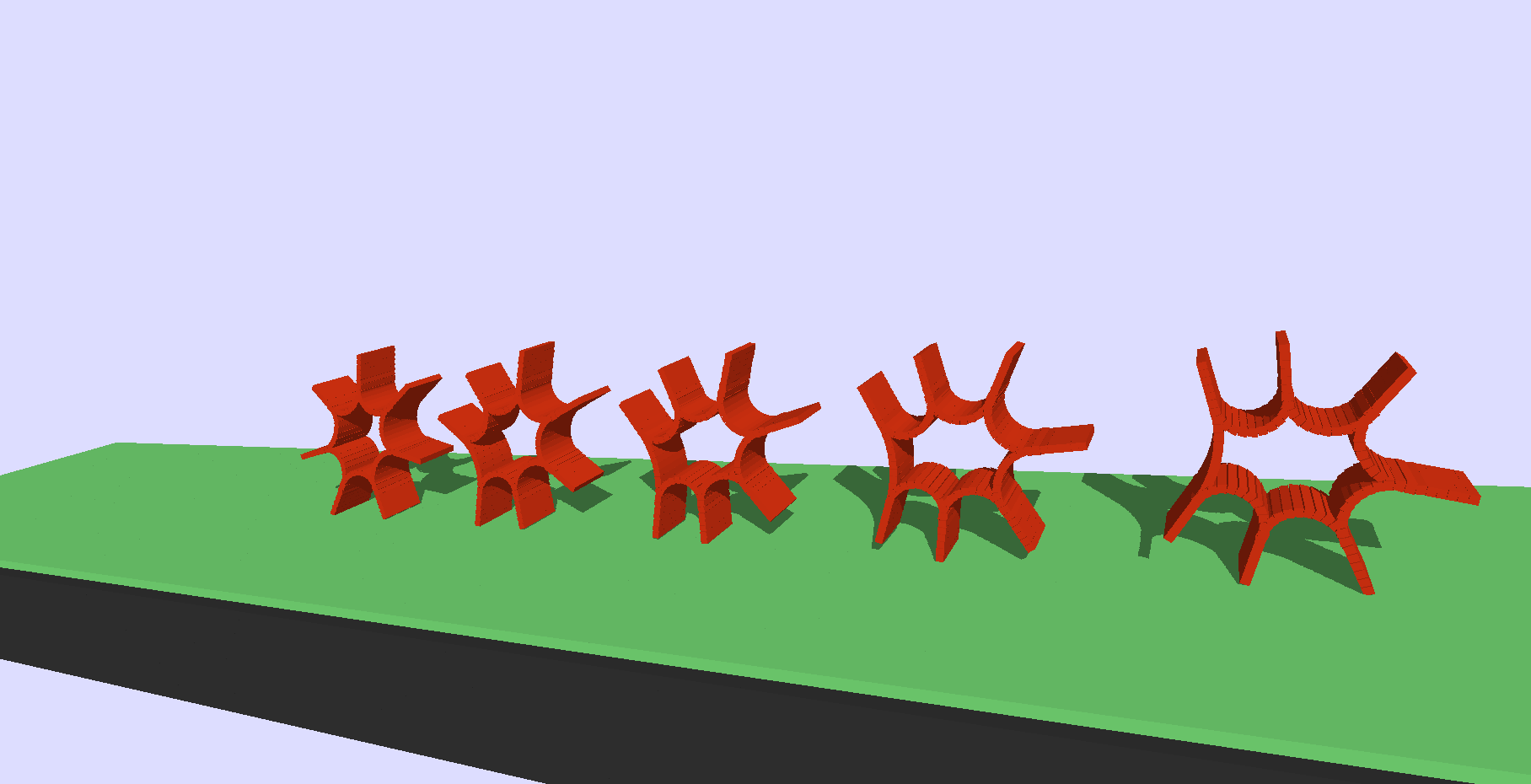
Soft Kirigami Composites
We report the inverse design of a new class of thin, flexible structures that can deform from a 2D plane to a pre-programmed 3D shape. Instead of relying on external stimuli such as mechanical loads or heat, the flexible structures buckle into 3D shapes by making use of the strain mismatch between the composite layers. Meanwhile, inspired by the kirigami, the 3D shapes can be controlled by the kirigami patterns. This drastically increases the design space and the number of possible 3D topologies.

Bistable Soft Kirigami Composites
Fully soft bistable mechanisms have shown extensive applications ranging from soft robotics, wearable devices, and medical tools, to energy harvesting. However, the lack of design and fabrication methods that are easy and potentially scalable limits their further adoption into mainstream applications. Here a top-down planar approach is presented by introducing Kirigami-inspired engineering combined with a pre-stretching process.

Smart Manufacturing of Energy-Efficient Aerospace Structures
In this project, we aim at making two MAE machine operations, the drilling machine and milling machine smarter. The data and model systems focus on modeled systems with phenomena not easily modeled with first principles models, e.g. machining processes that affect part quality, for example, drilling and milling as well as the situational thermal and mechanical impacts on the precision of a part and energy and productivity efficiency of the processes.

Preemptive Motion Planning for Human-to-Robot Indirect Placement Handovers
As technology advances, the need for safe, efficient, and collaborative human-robot-teams has become increasingly important. One of the most fundamental collaborative tasks in any setting is the object handover. Human to-robot handovers can take either of two approaches: (1) direct hand-to-hand or (2) indirect hand-to-placement-to-pickup.

Systematic Variation of Friction of Rods
In settings from shipping to sailing to surgery, thousands of different types of knots are used every day, each requiring a specific amount of force to tighten. This force depends on the material properties, friction, and the topology of the knot.
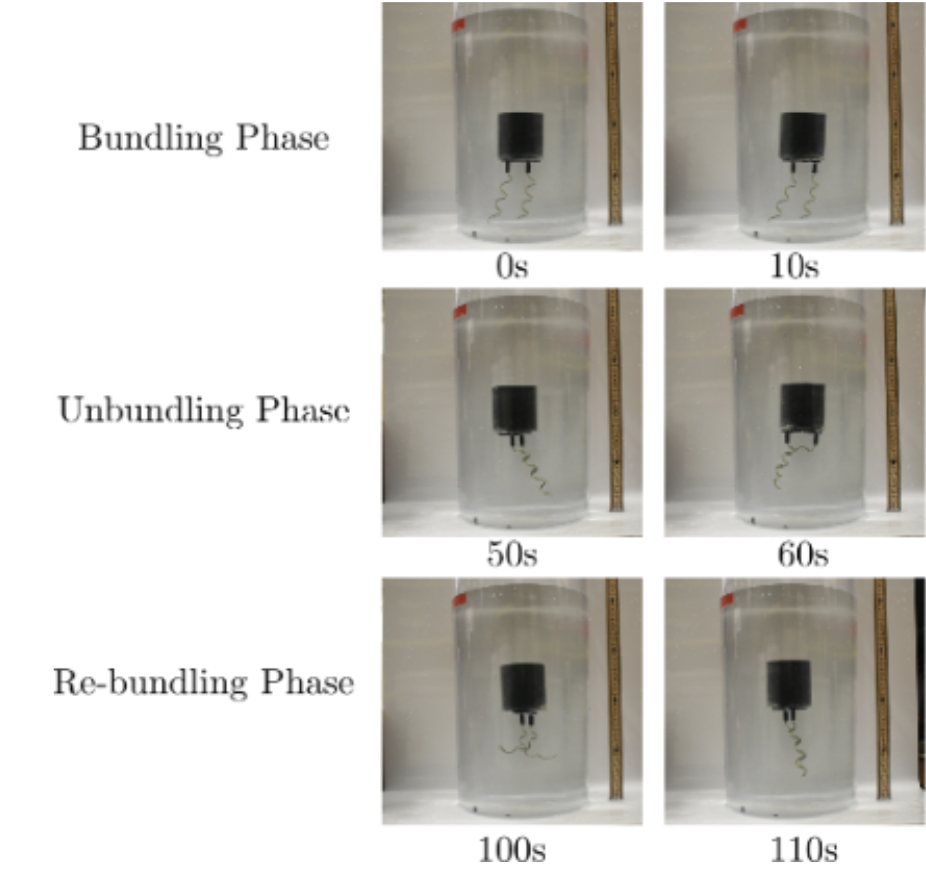
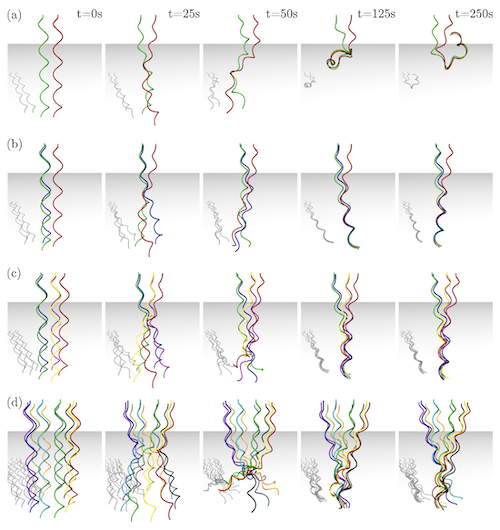
Bacteria-Inspired Bi-Flagellated Robots
The locomotion and mechanical efficiency of micro organisms, specifically micro-swimmers, have drawn interest in the fields of biology and fluid dynamics. A challenge in designing flagellated micro- and macro-scale robots is the geometrically nonlinear deformation of slender structures (e.g. rod-like flagella) ensuing from the interplay of elasticity and hydrodynamics.

Machine Learning Assisted Resistive Force Theory
The machine learning-assisted resistive force theory (MLRFT) accounts for local hydrodynamic forces distribution, the dependence on rotational and translational speeds and directions, and geometric parameters of the slender object. We show that, when classical RFT fails to accurately predict the forces, torques, and drags on slender rods under low Reynolds number flows, MLRFT exhibits good agreement with physically accurate SBT simulations.
A Fully Implicit Method for Robust Frictional Contact Handling in Elastic Rods
Accurate frictional contact is critical in simulating the assembly of rod-like structures in the practical world, such as knots, hairs, flagella, and more. Due to their high geometric nonlinearity and elasticity, rod-on-rod contact remains a challenging problem tackled by researchers in both computational mechanics and computer graphics.

Rapidly Encoding Generalizable Dynamics in a Euclidean Symmetric Neural Network
Slinky, a helical elastic rod, is a seemingly simple structure with unusual mechanical behavior; for example, it can walk down a flight of stairs under its own weight. Taking Slinky as a test-case, we propose a physics-informed deep learning approach for building reduced-order models of physical systems.

Robotic Manipulation for Automated Stability Testing of Elastic Structures
Experimental analysis of the mechanics of a deformable object, and particularly its stability, requires repetitive testing and, depending on the complexity of the object’s shape, a testing setup that can manipulate many degrees of freedom at the object’s boundary. Motivated by recent advancements in robotic manipulation of deformable objects, this letter addresses these challenges by constructing a method for automated stability testing of a slender elastic rod — a canonical example of a deformable object — using a robotic system.

Implicit Contact Model for Discrete Elastic Rods in Knot Tying
Rod–rod contact is critical in simulating knots and tangles. To simulate contact, typically a contact force is applied to enforce nonpenetration condition. This force is often applied explicitly (Euler forward). At every time-step in a dynamic simulation, the equations of motions are solved over and over again until the right amount of contact force successfully imposes the nonpenetration condition. There are two drawbacks: (1) Explicit implementation brings numerical convergence issues. (2) Solving equations of motion iteratively to find this right contact force slows down the simulation. In this article, we propose a simple, efficient, and fully implicit contact model with high convergence properties.

Machine Learning-assisted Physics-based Simulation of Slinky
Slinky, a helical elastic rod, is a seemingly simple structure with unusual mechanical behavior; for example, it can walk down a flight of stairs under its own weight. Taking the Slinky as a test-case, we propose a physics-informed deep learning approach for building reduced-order models of physical systems. The approach introduces a Euclidean symmetric neural network (ESNN) architecture that is trained under the neural ordinary differential equation framework to learn the 2D latent dynamics from the motion trajectory of a reduced-order representation of the 3D Slinky.

Weed Management
This project aims to develop a fully autonomous robotic system for precision weed control in flax and canola fields. Today, unmanned aerial vehicles (UAV) is one of the most commonly adopted technologies in precision agriculture. However, weed control through UAVs are susceptible to several drawbacks: Ineffective weed control for low crops, high maintenance cost and indiscriminate use of herbicide. These challenges motivated the use of unmanned ground vehicles (UGV) for effective weed control. The three critical components of the robotic system are: 1) autonomous navigation, 2) precision spraying and 3) autonomous charging. For navigation, a vison-based navigation system using semantic segmentation and line detection is proposed.

Snap Buckling in Overhand Knots
When an overhand knot tied in an elastic rod is tightened, it can undergo a sudden change in shape through snap buckling. In this paper, we use a combination of discrete differential geometry (DDG)-based simulations and tabletop experiments to explore the onset of buckling as a function of knot topology, rod geometry, and friction. In our setup, two open ends of an overhand knot are slowly pulled apart, which leads to snap buckling in the knot loop. We call this phenomenon “inversion” since the loop appears to dramatically move from one side of the knot to the other.

Robotic Painting: Mimicking Human Applicators
Robotically assisted painting is widely used for spray and dip applications. However, use of robots for coating substrates using a roller applicator has not been systematically investigated. We showed for the first time, a generic robot arm-supported approach to painting engineering substrates using a roller with a constant force at an accurate joint step, while retaining compliance and thussafety. We optimized the robot design such that it is able to coat the substrate using a roller with a performance equivalent to that of a human applicator. To achieve this, we optimized the force, frequency of adjustment , and position control parameters of robotic design.

Neural-Kalman GNSS/INS Navigation for Precision Agriculture
Precision agricultural robots require high-resolution navigation solutions. In this paper, we introduce a robust neural-inertial sequence learning approach to track such robots with ultra-intermittent GNSS updates.
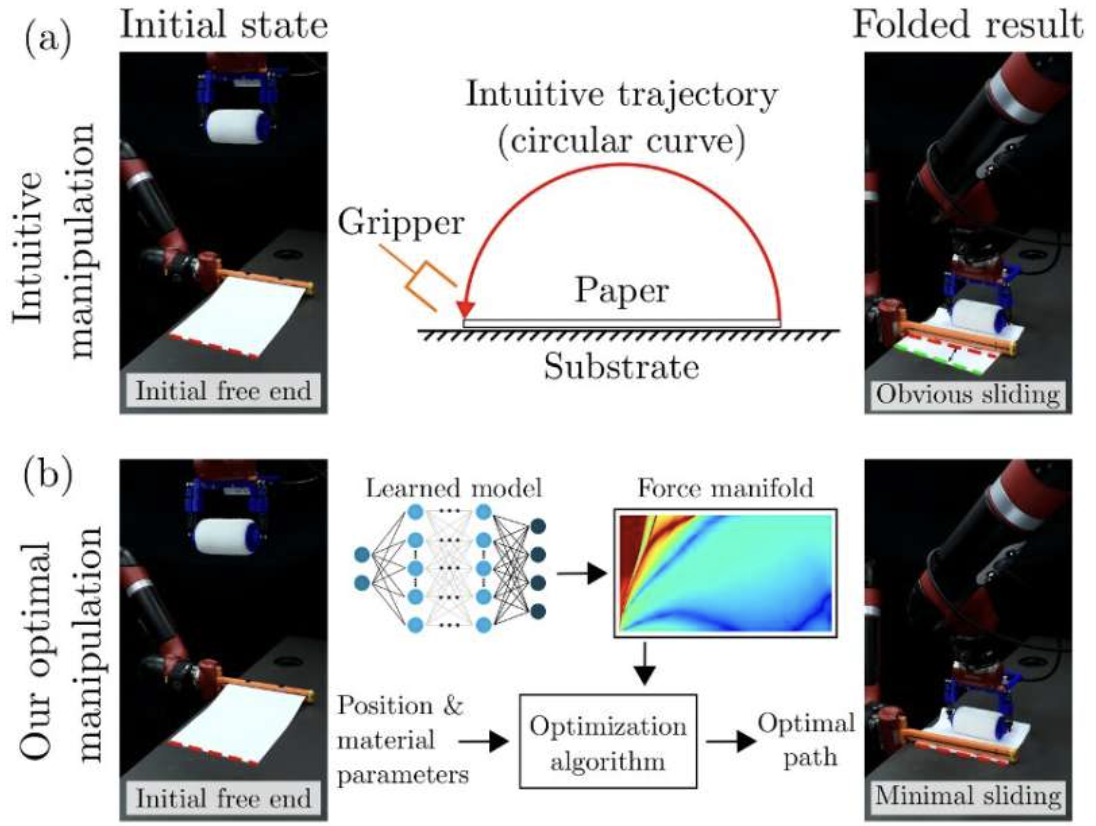
Deep Learning of Force Manifolds from the Simulated Physics of Robotic Paper Folding
Robotic manipulation of slender objects is challenging, especially when the induced deformations are large and nonlinear. Traditionally, learning-based control approaches, e.g., imitation learning, have been used to tackle deformable material manipulation. Such approaches lack generality and often suffer critical failure from a simple switch of material, geometric, and/or environmental (e.g., friction) properties.

Agronav: Autonomous Navigation Framework for Agricultural Robots and Vehicles using Semantic Segmentation and Semantic Line Detection
Automation is a key part of Precision Agriculture, which leverages modern technology to optimize crop and livestock management. Autonomous navigation, which is a central part of automation has been relatively under-explored in the agricultural setting despite its importance. The project addresses a vision-based autonomous navigation method in agricultural fields through two core tasks: Semantic Segmentation and Semantic Line Detection.