Simulation of Rolling Robot
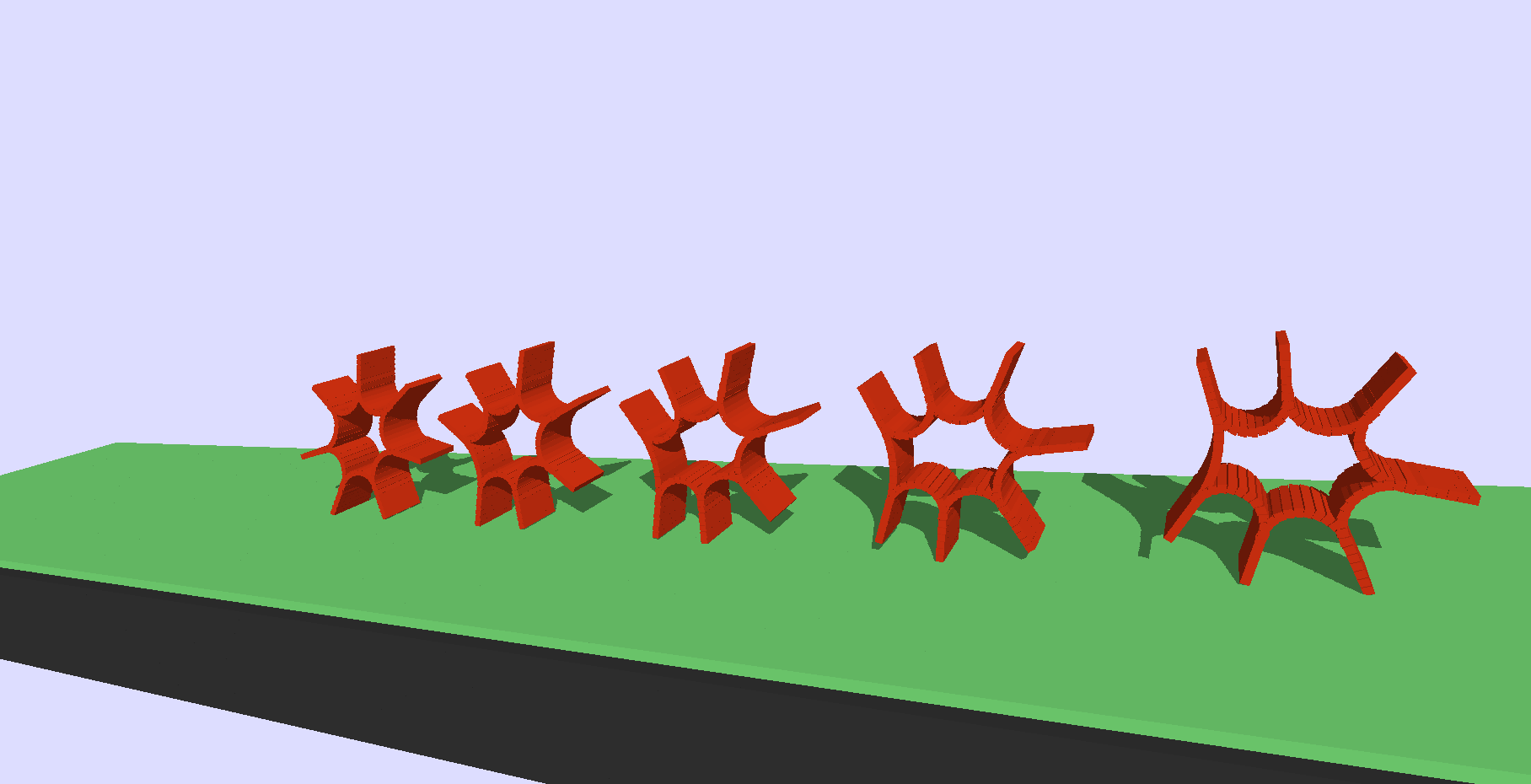
Soft robots are primarily composed of soft materials that can allow for mechanically robust maneuvers that are not typically possible with conventional rigid robotic systems. However, owing to the current limitations in simulation, design and control of soft robots often involve a painstaking trial. With the ultimate goal of a computational framework for soft robotic engineering, here we introduce a numerical simulation tool for limbed soft robots that draws inspiration from discrete differential geometry-based simulation of slender structures. The simulation incorporates an implicit treatment of the elasticity of the limbs, inelastic collision between a soft body and a rigid surface, and unilateral contact and Coulombic friction with an uneven surface. The computational efficiency of the numerical method enables it to run faster than real-time on a desktop processor. Our experiments and simulations show quantitative agreement and indicate the potential role of predictive simulations for soft robot design.
Publication: Huang, W., Huang, X., Majidi, C. and Jawed, M.K., 2020. Dynamic simulation of articulated soft robots. Nature communications, 11(1), pp.1-9. [LINK]
Funding: We acknowledge support from the Henry Samueli School of Engineering and Applied Science, University of California, Los Angeles