Research Funding
We gratefully acknowledge financial support from the National Science Foundation, the US Department of Agriculture, the National Institutes of Health, the US Department of Energy, Amazon Science Hub, and UCLA. Our main ongoing funded projects are summarized below.
Ongoing Grants

URSoRo/Collaborative Research: Untethered Reconfigurable Soft Robots with Multimodal Locomotion for Amphibious Unstructured Environments by Soft Electromagnetic Actuator
PI: Xiaonang Huang, co-PI: M. Khalid Jawed (UCLA)
Funding Agency: Division of Information and Intelligent Systems, National Science Foundation
Dates: 09/01/24 - 09/31/27
Award Number: 2332555
Link: https://www.nsf.gov/awardsearch/showAward?AWD_ID=2332555&HistoricalAwards=false
Abstract: Robots capable of navigating unstructured terrains in diverse environments, such as water and land, are crucial for many real-world applications. While soft robots can navigate challenging environments like narrow tunnels and rough surfaces due to their flexibility, most current designs are limited by slow speeds, reliance on ties to the base unit (i.e., tethered), and use in only one type of environment, such as land or water. Additionally, soft robots are time-consuming and expensive to create compared to rigid robots, which benefit from centuries of innovative generation. This project aims to create a new class of untethered, reconfigurable (i.e., able to change shape), and multimodal amphibious soft robots (URSoRo) assisted by a machine learning (ML) design tool to overcome these limitations. These robots will leverage a new class of soft electromagnetic (EM) actuators that can operate in more than one state, enabling them to swiftly adapt to challenging environments. This project will leverage the reconfigurability of soft robots for environmental adaptation and promote their practical applications, such as search and rescue operations, monitoring of animals and plants, and inspection of infrastructures in extreme environments. Additionally, the project will contribute to an annual inter-university soft robot competition across the United States and integrate findings into graduate-level courses on soft robotics at the University of Michigan, Ann Arbor, and the University of California, Los Angeles.
This project addresses two primary challenges in soft robotics: designing shapes and achieving bistability in soft actuators while maintaining a simple, low-cost fabrication process, and tightly integrating and engineering untethered reconfigurable soft robots with fast multimodal locomotion. The research will develop a soft bistable EM actuator with high force output (?0.4N), high activation frequency (>30 Hz), and the capability to be powered by miniaturized onboard electronics (<15 g). An ML-assisted physics-based simulation tool will be developed to guide the design, fabrication and robotic integration of these EM bistable actuators, enabling a fully planar rapid fabrication process. Liquid metal embedded elastomers will be used to enhance both thermal management and electromagnetic field generation, boosting the actuator's performance. Overall, this project will result in a new class of untethered soft robots driven by soft bistable EM actuators, alongside ML-assisted physics-based modeling and design tools, achieving an unprecedented combination of speed, size, mass, and reconfigurability. By addressing these technical challenges, it will contribute to the field of robotics with versatile, efficient, and cost-effective solutions for creating soft robots with rapid reconfiguration and advanced locomotion performance in unstructured and diverse real-world environments.

DSFAS: AI-based Fast Automated 3D Scene Reconstruction of Plants and Farms for Agricultural Robots
PI: M. Khalid Jawed (UCLA), co-PI: Jungseock Joo (UCLA), M. Mukhlesur Rahman (NDSU)
Funding Agency: National Institute of Food and Agriculture, United States Department of Agriculture
Dates: 08/01/24 - 07/31/28
Award Number: 2024-67021-42528
Abstract: Precision agriculture holds immense potential for improving farming practices, but current methods for monitoring and managing crops are often outdated and labor-intensive. Our project aims to address this challenge by developing an integrated software and hardware system for 3D reconstruction of farming environments. Led by a team of experts from the University of California, Los Angeles, and North Dakota State University,we will design, develop, and field-test an unmanned ground vehicle (UGV) equipped with advanced imaging capabilities. By autonomously capturing images from various camera angles, the UGV will enable farmers, agronomists, and roboticists to create virtual reality (VR) environments of farms, allowing them to visualize and interact with their crops in 3D.This innovative system will allow users to specify various parameters such as crop type, time of day, and season, and the VR environment will be able to emulate "time," generating dynamic 3D scenes representing the entire life cycle of crops. We envision three main application areas for this project: first, providing a complete package for robots and sensors used in precision agriculture, thus facilitating testing and deployment of robotic systems in real-world farming environments; second, offering a non-invasive tool for phenotyping in plant breeding and precision agriculture through automated 3D reconstruction of entire plants and farms; and third, enabling remote work for breeders and agronomists by providing accurate 3D representations of farming environments.Through collaboration with farmers and industry stakeholders, our project aims to advance knowledge and adoption of precision agriculture technologies. By providing new tools and techniques for monitoring and managing crops, we hope to improve farm productivity, efficiency, and sustainability, ultimately contributing to a more sustainable and environmentally friendly agricultural industry.

SCH: Versatile and Compact Telerobot with Haptic Feedback and Physics-Informed Simulation for Safety Enhanced Neurovascular Interventions
PI: Hao Su (NSCU), co-PI: M. Khalid Jawed (UCLA), Dr. Satoshi Tateshima (UCLA)
Funding Agency: National Institute of Neurological Disorders and Stroke, National Institutes of Health (R01)
Dates: 09/17/24 - 06/30/28
Award Number: 1R01NS141171-01
Link: https://reporter.nih.gov/project-details/11063398
Abstract: Stroke is a leading cause of mortality and chronic disability, which predominately occurs due to blood clots or plaques impeding the blood flow in the brain (ischemic stroke) or a rupture in brain arteries (hemorrhagic stroke). Minimally invasive endovascular procedures, e.g., thrombectomy (removing clots to restore blood flow) and neurovascular embolization (deploying coils in aneurysms to obstruct blood flow), are employed to treat these two strokes but also pose risks for X-ray radiation exposure. Robots were introduced to safeguard operators from radiation and increase precision via teleoperated control several meters away from the patient. However, these robots are bulky capital equipment and only mechanically compatible with a few instruments. To tackle these limitations, we developed a versatile 4-DOF robot with a significantly smaller size than state-of-the-art robots and is compatible with a wide variety of instruments. To further improve effectiveness and usability of endovascular robots, we identify three key limitations to the widespread adoption of robotic systems: 1) prolonged procedure time due to frequent robotic to manual conversions due to lack of full actuation of instruments; 2) steep learning curve and long training time for clinicians to implement complex surgical manipulation with robots to perform interventions due to the lack of coordinated control and pre-operative training of robot-assisted procedure; 3) elevated risks of vessel or aneurysm ruptures due to lack of haptic feedback for instrument-vessel interaction force. Our interdisciplinary team, consisting of experts in robotics (Su), mechanics (Jawed), interventional neuroradiology (Tateshima, M.D.), anatomy (Hartstone-Rose), human-robot interaction (Joo) will: 1) develop full actuation (avoid manual loading/unloading of instruments), coordinated control paradigms, and patient-side haptic module for our robot; 2) establish a machine learning-assisted physics-based simulation framework for pre-operative training and intra-operative situational awareness; 3) study human-robot interaction to evaluate multiple metrics about manual, partial actuation, and full actuation procedures. Our goal is to design intelligent robots in concert with pre-operative virtual training and intra-operative virtual fixtures (safety zone) to improve effectiveness and usability, thus ultimately enhancing safety and clinical outcome of neurovascular interventions.

Drone-based Biological Pest Control in High Tunnels
PI: M. Khalid Jawed (UCLA), co-PI: Andreas Neuman (UAV-IQ)
Funding Agency: California Department of Pesticide Regulation
Dates: 07/01/24 - 06/30/27
Award Number: N/A
Link: https://www.grants.ca.gov/grants/2024-department-of-pesticide-regulation-research-grants-program/
Abstract: Interest in small fruit production (e.g., strawberries) in California's high tunnels is growing. While high tunnels enhance berry yields and quality, pest control is more challenging than in open fields. Using drones to release predatory mites is a sustainable alternative to pesticides. While drone-based biocontrol is available in field production, it is not yet available in high tunnels. This project, a collaboration between UCLA's robotics group and a biocontrol service provider, leverages computer vision, AI, and robotics to develop software and hardware for autonomous drone operation within high tunnels, ensuring obstacle avoidance and precise release of predatory mites.

Collaborative Research: Elements: Discrete Simulation of Flexible Structures and Soft Robots
PI: M. Khalid Jawed (UCLA), co-PI: Jungseock Joo (UCLA), Andrew Sabelhaus (Boston U.), Carmel Majidi (Carnegie Mellon University)
Funding Agency: Software Institutes, National Science Foundation
Dates: 10/01/22 - 09/30/25
Award Number: 2209782, 2209784, 2209783
Link: https://www.nsf.gov/awardsearch/showAward?AWD_ID=2209782&HistoricalAwards=false
Abstract: The objective of this work is to develop a discrete differential geometry (DDG) simulation environment into a widely-available software package capable of modeling soft and flexible structures. The DDG approach enables low-dimensional modeling of slender rods and flexible shells combined into arbitrary shapes, establishing a practical but still physically accurate contrast to computationally expensive finite element analysis (FEA) techniques. This work first develops a core software package for DiSMech that adapts prior work to meet the standard for national cyberinfrastructure: maintainable, extensible, and with a robust user interface. Next, a virtual testbed for a wide class of soft and flexible robots is built by incorporating DiSMech into an existing robotics software suite. The project team will use the combined software framework with a machine learning approach to develop a locomotion strategy for example soft robots. Finally, add-ons to DiSMech will incorporate machine learning alongside the DDG-based physics models for even faster simulations, demonstrating the research potential for this software in uncovering underlying physical phenomena. By advancing DDG-based physics simulations to capture a wide range of soft and flexible structures, with a computational speed sufficient for learned robot control, all in an easy-to-use interface, DiSMech addresses an important gap in the national cyberinfrastructure.
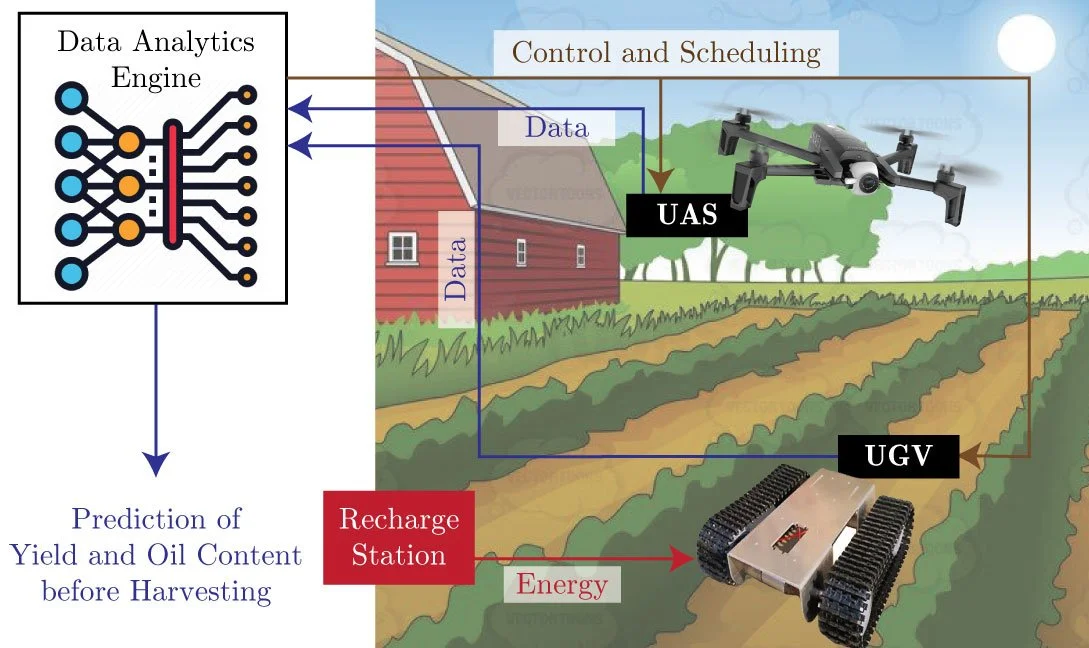
DSFAS: Harnessing Data for Accurate Yield and Oil Content Prediction
PI: Wei Wang (UCLA), co-PI: M. Khalid Jawed (UCLA), Joao Paulo Flores (NDSU), Mukhlesur
Rahman (NDSU)
Funding Agency: National Institute of Food and Agriculture, United States Department of Agriculture
Dates: 06/15/22 - 06/14/26
Award Number: 2022-67022-37021
Abstract: The research objective is design, development, and field-testing of an artificially intelligent method to predict the yield and oil content of flax from a number of morphological traits before harvesting. Success in this project will result in a quantum leap for flax breeding programs by bringing in a systematic data-driven autonomous approach, in lieu of conventional heuristic-based decision-making. NDSU hosts the only flax breeding program in the US and North Dakota is the largest producer of flax (91% of US production), which will be used as the testbed in this project. The project requires precision data collection on morphological traits throughout the entire life cycle of the crop. A cooperative team of unmanned aerial systems (UASs) and unmanned ground vehicles (UGVs) will be employed. The UGVs will also be loaded with a hyperspectral camera to predict the oil content even before harvesting. The scheduling and operation of the UAS-UGV team will be dictated by a data analytics engine. The videos collected by the UAS/UGV will be processed to extract various morphological traits and to predict the final yield of the crop through an integrated machine learning model. Hyperspectral images will be analyzed using machine learning to predict the oil content of each plot. If successful, this predictive model for yield and oil content will allow a breeder to substantially lower the costs of the breeding program, and hereby improve the quality of the new crop variety. In collaboration with AmeriFlax, this framework will be tested in real-world settings.

Machine Learning-based Modeling and Operation for Smart Machining of Aluminum Aerospace Structures
PI: Xiaochun Li (UCLA), co-PI: M. Khalid Jawed (UCLA), T. C. Tsao (UCLA)
Funding Agency: Clean Energy Smart Manufacturing Innovation Institute (funded by U.S. Department of Energy)
Dates: 02/01/22 - 09/30/24
Link: https://www.cesmii.org/
Abstract: In this project, we aim at making two MAE machine operations, the drilling machine and milling machine smarter. The data and model systems focus on modeled systems with phenomena not easily modeled with first principles models, e.g. machining processes that affect part quality, for example, drilling and milling as well as the situational thermal and mechanical impacts on the precision of a part and energy and productivity efficiency of the processes.

Collaborative Research: Mechanics of Knots and Tangles of Elastic Rods
PI: M. Khalid Jawed (UCLA), co-PI: Bashir Khoda (University of Maine)
Funding Agency: Mechanics of Materials and Structures, National Science Foundation
Dates: 10/01/21 - 09/30/24
Award Number: 2101751, 2101745
LINK: https://www.nsf.gov/awardsearch/showAward?AWD_ID=2101751&HistoricalAwards=false
Abstract: The research objective of this project is to quantify the mechanical response of knots tied in elastic rods. The project will employ (1) fast numerical simulations inspired by computer graphics, (2) innovative materials with customizable friction, and (3) autonomous robotic experiments to untangle the mechanics of knots. Even in the case of the most basic type of knots (overhand knots), the force required to tie the knot depends on an intricate interplay of (1) elasticity, (2) friction, and (3) topology. Interestingly, the overhand knot may undergo a snap-through buckling instability beyond a critical amount of pull. Such instability in a basic knot points to the richness of the mechanical behavior of knots. After developing simulation and experimental tools, the mechanical response and instabilities of a few common knots, e.g. overhand and shoelace knots, will be investigated. Exploiting the computational speed of the simulation tool and autonomy of robotic experiments, the mechanical response of several types of knots will be quantified to build a library of their mechanics. This data will be used to rationalize the variation of a knot’s mechanical response as a function of the topological, material, and frictional parameters. Similar to the periodic table of elements, a mechanics-based classification scheme of knots will be formulated, where the knots will be grouped into various classes, such as, friction-dominated knots, bending-dominated knots, and others.

CAREER: MaLPhySiCS - Machine Learning-assisted Physics-based Simulation and Control of Soft Robots
PI: M. Khalid Jawed (UCLA)
Funding Agency: Dynamics, Control and System Diagnostics (DCSD), National Science Foundation
Dates: 10/01/21 - 09/30/26
Award Number: 2047663
LINK: https://www.nsf.gov/awardsearch/showAward?AWD_ID=2047663&HistoricalAwards=false
Abstract: The research objective of this project is formulation of fast and efficient physics-based simulation, assisted by machine learning, for autonomous control of soft robots. Using this framework, a macroscale bacteria-inspired robot will be designed and controlled. This robot will use buckling in flagellum (thin flexible tail) to control its swimming direction. This is expected to be the simplest autonomous soft robot with a single scalar control input. Two key challenges to be tackled in the project are: (1) computational efficiency so that the simulation can be used for optimization, and (2) physical accuracy and robustness of the models so that model-based control can be employed on the real robotic systems. Towards this goal, machine learning-assisted modeling of complex systems in a discrete differential geometry-based simulation framework is planned. Neural network-based models for the structure of the robot and the hydrodynamics will be developed. These models are expected to be as fast as simplified heuristic models and as accurate as physics-based fine-grained models. This simulation tool will be used to develop a model-based control framework for the bacteria-inspired robot for untethered autonomous operation. This robot can help us gain insight into bacterial locomotion, e.g., role of instability in bacterial propulsion. From a robotics perspective, the robot has only one control input with minuscule number of moving parts. The design of the robot makes it amenable for miniaturization to sub-millimeter scale with potential biomedical applications.

Deep Spring: a Neural Network-based Approach to Design of Slender Structures
PI: Vwani Roychowdhury (UCLA), co-PI: M. Khalid Jawed (UCLA)
Funding Agency: Computational & Data-Enabled Science & Engineering, National Science Foundation
Dates: 07/01/21 - 06/30/24
Award Number: 2053971
LINK: https://www.nsf.gov/awardsearch/showAward?AWD_ID=2053971&HistoricalAwards=false
Abstract: This project will enable the design of new materials and structures like soft kirigami composites and compressive buckling-induced micro-sized 3D architecture materials. The researchers will advance numerical modeling of systems with slender structures through a combination of machine learning and discrete differential geometry, using “nonlinear springs” represented by neural networks to simulate the systems. The enhanced computational speed of this approach will aid in the design and optimization of engineering systems such as deployable structures and soft robots. Developing predictive models for slender structures and metamaterials is challenging because of the inherent instabilities and many possible configurations. If successful, this development would be the first of its kind in the mechanics research community and would provide the twin capability to predict complex structural responses and design structures with an inverse problem solver. While the target proof-of-concept examples relate to slender structures and metamaterials, the computational methods would be generalizable to a broad class of material-structure systems.
Autonomous Robotic Systems for Precision Weed Control in Flax
PI: Mukhlesur Rahman (NDSU), co-PI: Mohiuddin Quadir (NDSU) and M. Khalid Jawed (UCLA)
Funding Agency: National Institute of Food and Agriculture, United States Department of Agriculture
Dates: 02/01/21 - 01/31/26
Award Number: 2021-67022-34200
Abstract: North Dakota is the leading producer of flax for oil and food use. The crop is a poor competitor with in-field weeds that reduce seed production. Traditionally, herbicides are used for weed control using large-scale sprayers that dispense herbicide over crops and weeds alike. The method results in the overuse of herbicides and a reduction in crop yield. In the United States, 1.2 billion pounds of pesticides were used in agricultural crops, and the cost was about $14 billion in 2012. Agricultural Robotics can be used for the precision application of pesticides that may reduce 90% of total pesticide use and reduce material costs by $12.6 billion. In addition to the money saved, optimized pesticide use can reduce environmental contamination and increase the organic life of the soil. In this project, we are attempting to develop a small, low-cost autonomous weed-spraying rover capable of computer vision-based weed detection, complete field coverage, and automatic recharge in an experimental field of flax crops. The proposed robot has four major systems, (i) a robot control and stability system, (ii) a computer vision-based navigation system, (iii) a weed identification system, and (iv) an herbicide application system. In addition, robot-actuable spray solutions will be formulated, which will lower the amount of herbicide sprayed per unit area of the field and show targeted efficiency in suppressing weed growth. The target application is hypothesized to make weed control in flax and other row crop fields fully autonomous, even when the spacing between crop lines is as small as one foot.
Past/Previous Grants

CCRI: Planning-C: A Framework for Development of Robots and IoT for Precision Agriculture
PI: M. Khalid Jawed (UCLA), co-PI: Sriram Narasimhan (UCLA), Jungseock Joo (UCLA), Wei Wang (UCLA)
Funding Agency: CISE Community Research Infrastructure, National Science Foundation
Dates: 08/15/22 - 01/31/24
Award Number: 2213839
LINK: https://www.nsf.gov/awardsearch/showAward?AWD_ID=2213839&HistoricalAwards=false
Abstract: The fourth industrial revolution - characterized by smart automation and inter-connectivity - is about to change farm management practices forever. To hasten this positive change, the project team envisions an infrastructure that enables rapid development of robotic hardware, sensing technologies, software tools, and machine learning algorithms. While computer scientists and roboticists are developing novel software and hardware every day with great potential for precision agriculture, these tools typically fall short of real-world application. The envisioned simulation environment for testing such tools will bridge the gap between fundamental research and real-world deployment. These tools can enable autonomous farm management, including precision weed/pest management, precision irrigation, autonomous crop health monitoring, and precision crop protection. This can dramatically cut down labor costs, reduce chemical usage, lower the impact on water resources, conserve the fertility of soil, and increase the yield of crops. Computer scientists and roboticists will be able to get familiar with real-world challenges of precision agriculture, e.g., dramatic effects of precipitation on agriculture. The project team will collect preliminary data to prototype the infrastructure, organize workshops with interested researchers to plan the infrastructure, and connect with farmers and agronomists to gather feedback.

NRI: FND: Physics-based Training of Robots for Manipulation of Ropes and Clothes
PI: M. Khalid Jawed (UCLA), co-PI: Jungseock Joo (UCLA)
Funding Agency: National Robotics Initiative, National Science Foundation
Dates: 09/01/19 - 08/31/23
Award Number: 1925360
LINK: https://www.nsf.gov/awardsearch/showAward?AWD_ID=1925360&HistoricalAwards=false
Abstract: The research objective of this project is to fundamentally understand robotic manipulation of flexible objects (ropes & clothes) using model-based training. The team of researchers will develop physics-based simulation tools for the mechanics of deformable structures and demonstrate the application of fast and efficient simulations to train robots. To overcome the barriers associated with translating models to the real world, the researchers will use simulations, in conjunction with optimization, to formulate policies that are robust against uncertainties, e.g., friction and material defects. The goal is simulation-based training of cobots that is ready for application in the real world; this will largely remove the painstaking training process by physical demonstration required for collaborative robots. The strength of this approach will be demonstrated through autonomous folding of towels and tying of knots to secure objects.

Multimodal Communicative Learning for Robot Navigation
PI: Jungseock Joo (UCLA), co-PI: M. Khalid Jawed (UCLA)
Funding Agency: Amazon (Science Hub for Humanity and Artificial Intelligence)
Dates: 2022
LINK: https://www.sciencehub.ucla.edu/
Abstract: We propose to develop a comprehensive learning framework for autonomous navigating robots that can communicate and interact with human users while navigating indoors and outdoors. Robotic navigation has received much attention in industry and academia and has many real world applications such as food delivery robots and household robots (e.g., Amazon Astros). Our proposed research specifically tackles three key challenges in robotic navigation as follows.
Multimodal Human Interaction
Scalable and Customizable Learning
Simulation-to-Real