Bacteria-inspired Bi-flagellated Robots
Who is working on this project: Sangmin Lim, Zhuonan Hao
Bacteria Inspired Multi-Flagella Propelled Soft Robot at Low Reynolds Number
The bundling of flagella is known to create a "run" phase, where the bacteria moves in a nearly straight line rather than making changes in direction. Historically, mechanical explanations for the bundling phenomenon intrigued many researchers, and significant advances were made in physical models and experimental methods. Contributing to the field of research, we present a bacteria-inspired centimeter-scale soft robotic hardware platform and a computational framework for a physically plausible simulation model of the multi-flagellated robot under low Reynolds number (~10-1). The fluid-structure interaction simulation couples the Discrete Elastic Rods algorithm with the method of Regularized Stokeslet Segments. Contact between two flagella is handled by a penalty-based method. We present a comparison between our experimental and simulation results and verify that the simulation tool can capture the essential physics of this problem. The robustness to buckling provided by the bundling phenomenon and the efficiency of a multi-flagellated soft robot is compared with the single-flagellated counterpart. Observations were made on the coupling between geometry and elasticity, which manifests itself in the propulsion of the robot by nonlinear dependency on the rotational speed of the flagella.

Publication: Lim, S., Yadunandan, A. and Jawed, M.K. (2023) ‘Bacteria-inspired Robotic Propulsion from Bundling of Soft Helical Filaments at Low Reynolds Number’, Soft matter [Preprint].
Funding: We are grateful for the financial support from the National Science Foundation (Award numbers: IIS-1925360, CMMI-2053971, CAREER2047663) and the Henry Samueli School of Engineering and Applied Science, University of California, Los Angeles.
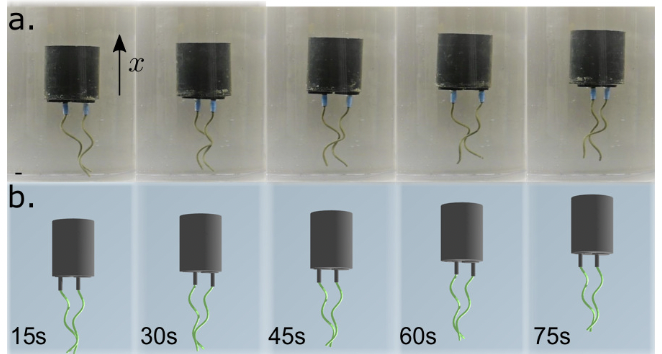
Bacteria-inspired Bi-flagellated Soft Robot with Bundling and Tumbling Behavior
Inspired by bacteria, we present a soft macroscopic robot with two flexible helical flagella that can control its swimming speed and direction at the low Reynolds number with two scalar control inputs. A physics-based computational tool, inspired by algorithms used in animation by the computer graphics community, is developed to simulate the robot's motion. Since the discovery of bacterial locomotion, the motility of bacterial flagella has inspired robotic developments under viscous fluid. Our framework introduces a silicone-based design and fabrication strategy using off-the-shelf materials and a feedback control scheme for a constant speed actuation. We investigate two modes of locomotion: bundling and tumbling, which grant the bacteria directional stability and changeable orientation. This work uses the discrete differential geometry-based Discrete Elastic Rod (DER) method to model the flagella as Kirchhoff's elastic rods. DER is coupled with the Regularized Stokeslet Segments (RSS) method for the hydrodynamics and the implicit contact (IMC) model for a physically accurate simulation of the bi-flagellated soft robot. We present the emergent bundling and tumbling on our macroscopic bacterial robot and compare them with simulation results. As an advance in helical flagella, we propose a simple way of achieving non-reciprocal motion to overcome the constraint set by Scallop's theorem. We expect our framework to encourage more study on the mobility of microscopic flagella robots for in-vivo operations such as drug delivery.
Publication: TBD
Funding: We are grateful for the financial support from the National Science Foundation (Award numbers: IIS-1925360, CMMI-2053971, CMMI-2101751, CAREER-2047663) and the Henry Samueli School of Engineering and Applied Science, University of California, Los Angeles.
YouTube: https://youtu.be/qevN1NovCZs